더지엠뉴스 김평화 기자 | 휴머노이드 로봇의 손은 ‘집기’에서 ‘조작’으로 목표가 바뀌면서 자유도·촉각·제어가 한꺼번에 고도화되는 구간에 들어섰다. 로봇핸드는 본체의 팔·다리보다 작은 부품처럼 보이지만, 정밀 작업의 성공률과 제품 단가를 동시에 좌우하는 중심 모듈로 재편되고 있다.
20일 KIC중국에 따르면, 휴머노이드 로봇핸드는 최종적으로 24자유도 구현을 지향하는 흐름 속에서 완전 구동과 부분 구동의 선택이 성능·원가를 가르는 분기점으로 제시됐다. 완전 구동은 관절마다 구동원을 붙여 미세 동작을 확보하지만 부품 수와 조립 난도가 증가하고, 부분 구동은 핵심 관절 중심으로 구동을 배치해 단가를 낮추는 대신 손끝 조작의 한계를 관리해야 한다.
로드맵은 기술 발전을 1.0, 2.0, 3.0의 세 단계로 정리한다. 1.0은 기계식 손가락을 ‘움직이게 만드는’ 단계로, 산업용 그리퍼의 연장선에서 구조를 단순화해 반복 작업에 초점을 맞췄다. 2.0은 다관절·생체모방 구조가 본격 등장해 관절 수를 늘리고 손가락 형상을 인간 손에 가깝게 설계하며 통합 제어를 탐색한 시기다. 3.0은 대형 모델 기반의 지능형 제어와 결합하면서 양산 가능 구조를 경쟁하는 단계로 넘어가, 단순한 관절 수 경쟁이 아니라 구동·전달·감지의 ‘조합 설계’가 제품 경쟁력을 좌우하는 구조로 전개되고 있다.
구동 시스템은 로봇핸드의 체급과 능력을 가장 직접적으로 결정한다. 관절별 구동원을 촘촘히 배치하면 손가락마다 독립 제어가 가능해지고, 미세한 집기 힘 조절과 복잡한 손동작 시퀀스를 구현하기 유리하다. 반대로 구동원을 줄이거나 손바닥·전완부 등으로 분산 배치하면 무게와 발열, 유지보수 난도를 낮출 수 있지만, 힘 전달 경로가 길어지면서 반응성과 정밀도 관리가 과제로 남는다. 로봇핸드가 산업 현장에서 초소형 나사 체결이나 정밀 조립으로 들어갈수록 관절별 제어 정밀도가 중요해지고, 가정 환경에서는 달걀처럼 손상되기 쉬운 물체를 파지하는 수준의 ‘힘의 해상도’가 요구되면서 구동 설계의 기준이 달라진다.
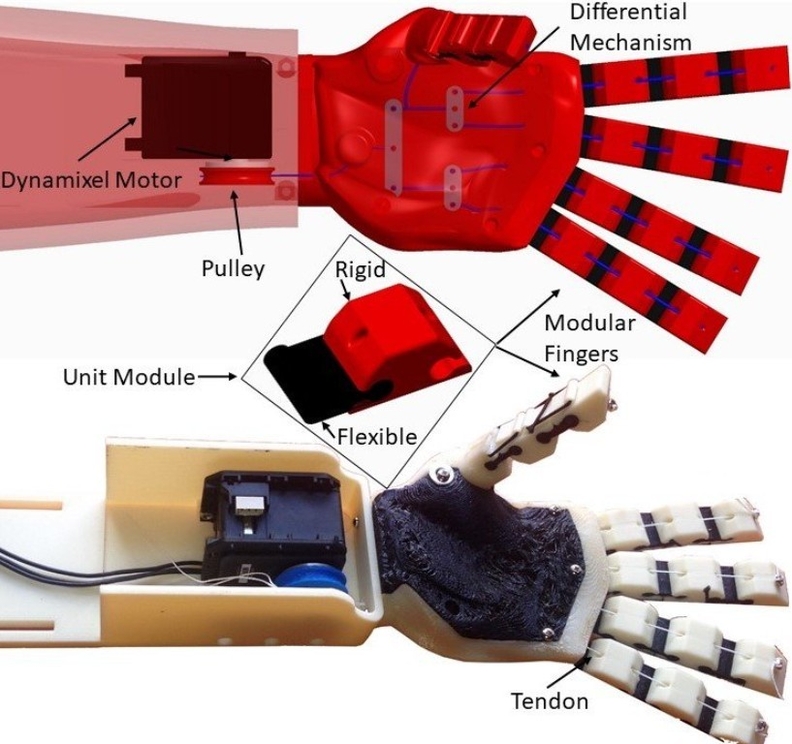
전달 시스템은 ‘어떻게 힘을 손끝으로 옮기느냐’의 문제다. 텐던 기반 전달은 고자유도 구현에 유리하고 손끝에 구동부를 몰지 않아도 되지만, 텐던의 장력 유지·마모·정렬 문제를 관리해야 하며 제작비가 커지기 쉽다. 링크 기반 전달은 구조가 직관적이고 가공·조립 측면에서 비용을 낮추기 유리하지만, 자유도 확장에 제약이 생기고 손끝의 유연한 미세 조작이 어려워질 수 있다. 현장 적용 관점에서는 고정밀 조작을 목표로 하는 제품군이 텐던·스크루 같은 복합 전달을 채택하는 경향이 강하고, 반복 로딩·언로딩과 검사 공정 중심의 제품군은 링크·기어 결합으로 비용과 내구성에 무게를 두는 방향이 제시됐다.
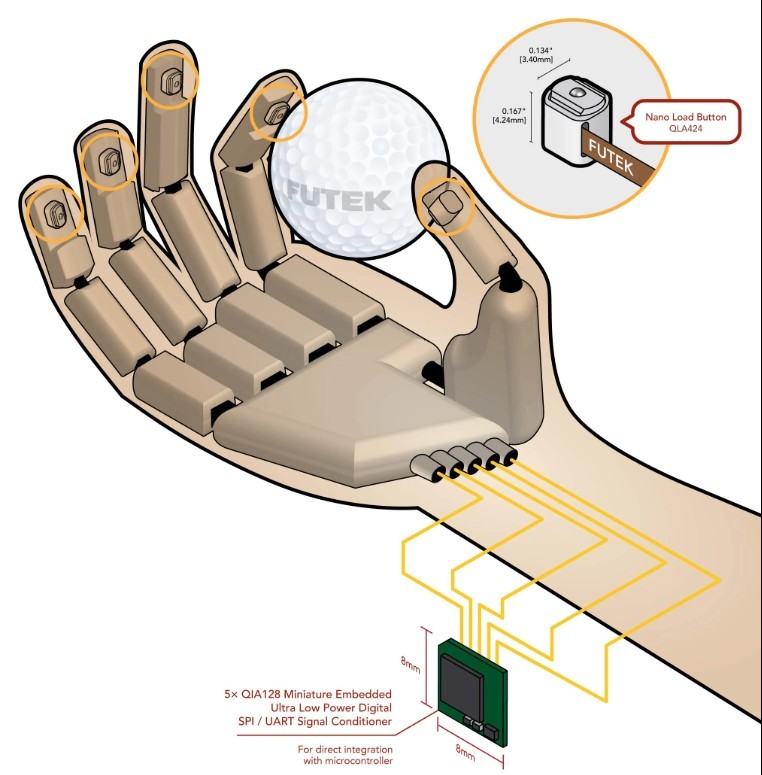
감지 시스템은 로봇핸드를 ‘보는 손’에서 ‘느끼는 손’으로 바꾸는 핵심 요소다. 힘·토크 센서는 접촉 순간의 힘 변화를 실시간으로 읽어 제어기가 즉시 파지력을 조절하게 만들며, 물체가 미끄러지거나 걸리는 순간을 감지해 동작을 수정하는 기반이 된다. 촉각 센서가 들어오면 단순히 “쥐었다”가 아니라 “얼마나 미끄러운지, 어디에 압력이 집중되는지, 손가락 끝이 먼저 닿았는지” 같은 정보가 제어 루프에 들어간다. 이 과정에서 센서의 분해능과 신호 안정성, 내구성이 곧 작업 성공률로 연결되며, 센서와 제어 알고리즘이 함께 발전해야 성능이 올라간다는 구조가 제시됐다.

원가 구조에서도 로봇핸드는 부담이 큰 부품으로 분류된다. 자료는 로봇핸드가 전체 시스템 원가에서 15~20%를 차지하는 비중으로 제시되며, 특히 촉각·힘 센서와 같은 감지 부품은 설계 목표에 따라 원가 영향도가 크게 달라질 수 있다고 정리한다. 결국 제조사는 ‘완전 구동+고해상 촉각’으로 가는 상단 사양과 ‘부분 구동+견고한 전달’로 가는 비용 최적화 사양 사이에서 목표 시장과 작업 시나리오를 먼저 확정한 뒤 부품 조합을 결정하는 흐름으로 정리된다.
부품 공급망은 구동 모터, 텐던 소재, 촉각 센서로 크게 갈린다. 고정밀 소형 모터는 고성능 구간에서 해외 업체가 강세를 보이는 영역으로 정리됐고, 중국 내 기업들은 권선 공정과 품질 균일도 개선으로 회전 속도 변동을 낮추는 방식으로 추격하는 흐름이 제시됐다. 텐던 소재는 초고분자량 폴리에틸렌 계열 섬유가 핵심으로, 인장 강도와 피로 내구성 개선이 곧 제품 수명과 유지비로 연결된다. 촉각 센서는 유연 기판·전자피부 형태로 진화하면서 생산 능력과 해상도, 대량 양산 공정이 경쟁 포인트로 정리됐다.
제어 측면의 가장 큰 병목은 데이터다. 형태가 일정하지 않은 물체를 잡는 상황에서 학습 데이터가 부족하면 물체의 형상과 무게중심을 추정하기 어렵고, 그 결과 파지 성공률이 낮아지는 문제가 반복된다. 산업 현장에서는 품목이 수시로 바뀌는 물류 분류·검사 공정에서 이 문제가 더 뚜렷해져, 하드웨어 성능뿐 아니라 데이터 구축과 작업 시나리오 설계가 제품 성능을 결정하는 요소로 제시됐다.
향후 제품 설계 방향은 유연화·경량화·자율화로 정리된다. 유연화는 실리콘 손가락과 전자피부를 통해 손상 위험을 줄이고 촉각 기반 제어를 강화하는 방향이고, 경량화는 구동부를 전완부 쪽으로 보내고 텐던 전달을 최적화해 손끝 질량을 낮추는 설계가 핵심으로 제시됐다. 자율화는 로봇핸드 단독 성능이 아니라 지능형 제어와 결합해 “잡는 동작” 자체를 자동으로 최적화하는 방향으로 설명된다.
KIC중국(글로벌혁신센터·김종문 센터장)은 2016년 6월 중국 베이징 중관촌에 설립된 한국 과학기술정보통신부 산하 비영리기관이다.
한국 창업기업과 혁신기업의 중국시장 개척을 지원하는 것이 주요 업무다. 또 중국 진출의 정확한 로드맵을 제공하고 플랫폼 역할도 한다.중국 여행





